
miniRanger
This user manual provides a detailed overview in the use of our LiDAR mapping systems. It addresses and explains the working principles of the underlying components, the system architecture, and the required software. This manual is not intended to replace customer training. Instead, it should serve as introductory material for new users and a reference tool for experienced personnel. Use the link below to access the wiki.

Point Density: 473 points per m^2
Height: 60 m AGL (approx.)
Speed: 6 m/s
Data Acquisition Time: 8 minutes

Discover the groundbreaking impact of LIDAR technology in urban development with EHRA’s innovative use of the Mini-Ranger LIDAR system. In this insightful video, we delve into how EHRA, a leading engineering firm, leverages the power of Drone LIDAR and the MiniRanger system to revolutionize urban planning and project management.
In the ever-evolving world of technology, LiDAR (Light Detection and Ranging) has emerged as a groundbreaking tool, especially in the realm of natural disaster research. The RAPID Facility, an integral part of the Natural Hazards Engineering Research Infrastructure (NERI) network, has been at the forefront of harnessing this technology. Their mission? To support researchers in collecting invaluable data on natural disasters, offering insights that were previously unimaginable.
Are you tired of sifting through endless options and specifications to find the right drone lidar sensor for your needs? Look no further! Our comprehensive selection guide takes the guesswork out of the process, helping you make informed decisions about which sensor is best suited for your project.
Our guide offers a detailed overview of the key features and benefits of various drone lidar sensors, including their range, accuracy, and data output capabilities.

Join us for an intriguing webinar alongside Jeff Rizza of DJ&A to explore a unique UAV LiDAR project they completed for NASA and MSU earlier this year! As a contributor to the NASA SnowEx program, DJ&A used a Phoenix LiDAR system to capture highly detailed point clouds of snow surfaces that will be used by scientists for snow dynamics research. You won’t want to miss this one! Stick around until the end for a sneak peak on DJ&A’s upcoming white paper comparing UAV LiDAR and photogrammetry for topographic mapping!
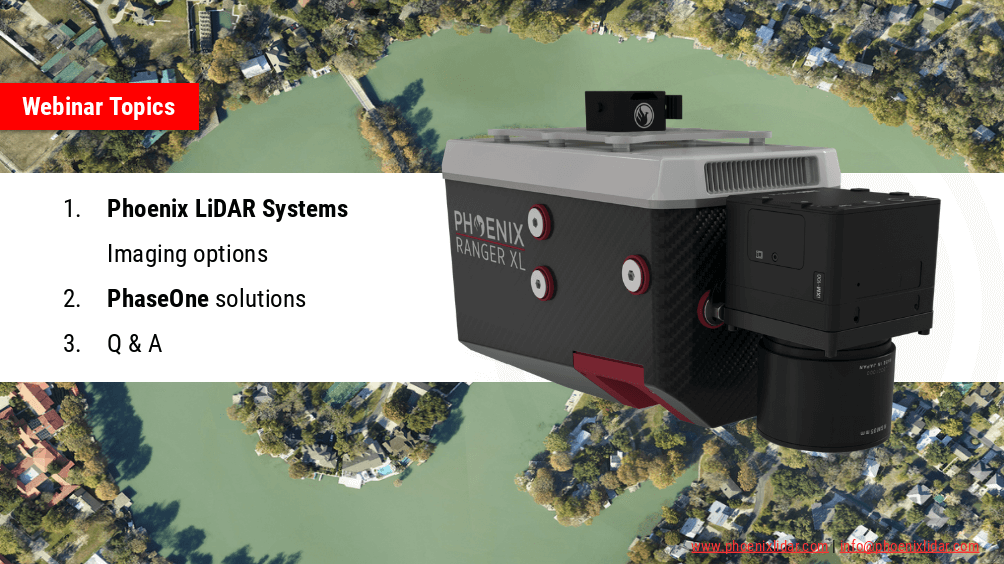
Phoenix LiDAR Systems are capable of much more than point-clouds! In this webinar we team up with our premier imaging partner, PhaseONE to showcase how two of the world’s leading aerial surveying companies are synergizing the industry to push the limits of what’s possible. Also we’ll go over our other advanced imaging systems including dual-oblique, hyperspectral, thermal, NIR, and more!
Under task order G17PD01249: Alaska Critical Infrastructure UAV Airfield Obstruction Survey the Dewberry team was tasked to perform a test of the sensors that would be utilized in the survey of the Kiana and Nulato Airfields. As part of this testing our partners Compass Data and Phoenix LiDAR performed the acquisition and post processing of the LiDAR data using two (2)
sensors each flown at two different heights above ground. These parameters were designed in order to determine each of the following items:
General Ability to meet project specifications – These tests were used to determine if each sensor could meet the general project requirements for data formatting and LAS point cloud data. Items like smooth surface repeatability, relative accuracy, intensity values, and other were tested for each sensor and flying height.
LiDAR Density – Because we are utilizing a UAS based approach the intent was to determine what sensor and flying height would yield an appropriate density of points to determine the heights of obstructions.
Geometric Calibration – Tested to determine if each sensor was providing accurate and repeatable measurements from the two different flying heights.
Radiometric Testing – Tested to determine if each sensor was capable of identifying small or low-reflectance obstructions such as poles or antennas.
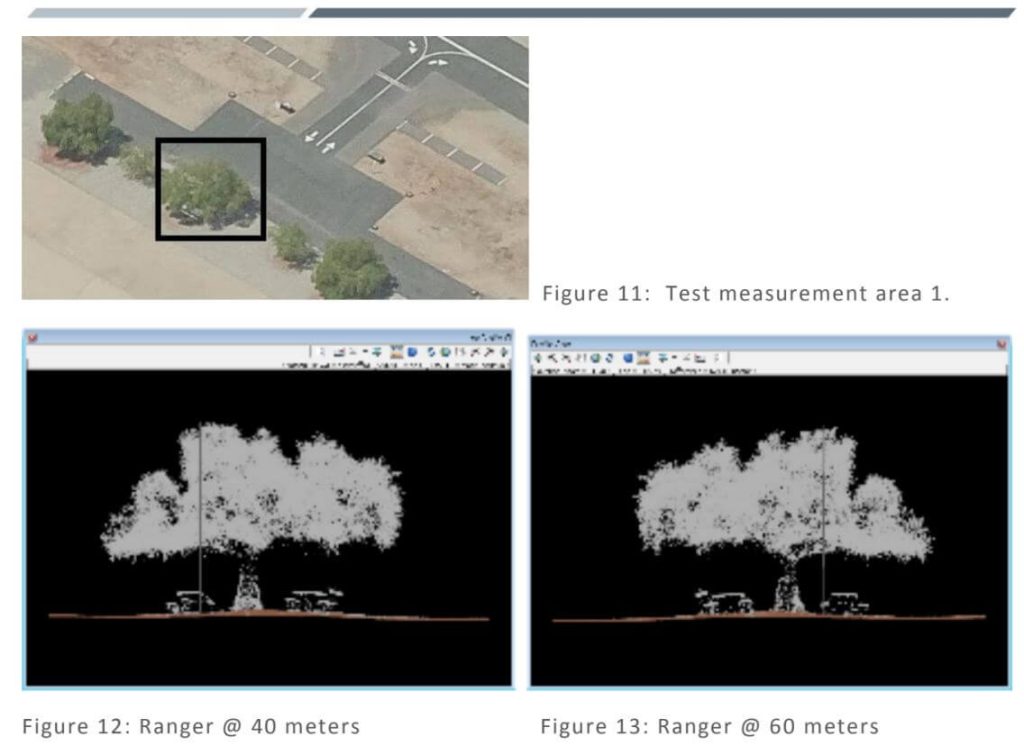
Measurement Consistency – This was tested across each of the 4 flights to determine how consistently the maximum elevation could be determined on the test apparatus as well as on trees and other vertical features in the AOI.
The following report documents the calibration testing performed by the Dewberry team.