SPATIALEXPLORER
A COMPLETE START TO FINISH DATA ACQUISITION AND PROCESSING WORKFLOW
SpatialExplorer is the core of Phoenix LiDAR’s desktop software suite. It is an extensible program that is built to ensure you get the data you need. Starting from data acquisition, SpatialExplorer provides tools for real time streaming point clouds, telemetry monitoring, and other in-field quality control.
Post acquisition data processing tools put users in control of their datasets. SpatialExplorer transforms raw data inputs into geospatially accurate and refined outputs.
SpatialExplorer can be expanded with a selection of plug-in modules that add advanced functionality at critical steps in the data collection and production.
New in the SpatialExplorer Suite

Support for new sensors
- Sony LR-1 61MP
- Mosaic 51 Panoramic Camera
- PhaseOne integrated acquisition control
Updated realtime positioning
- Streaming high accuracy RTK correction to rover
- Connect to any NTRIP caster from SpatialExplorer
Improved Sensor Control
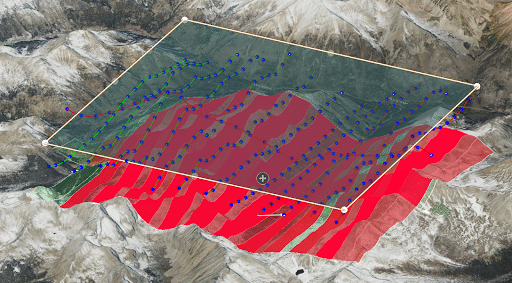
- Geo-polygon AOI automatic sensor enable/disable
- Camera trigger by location
- Camera trigger point-in-view for inspections
Vector Data Creation
- 3D feature digitization with points, lines, and polygons
- Editable attribute table
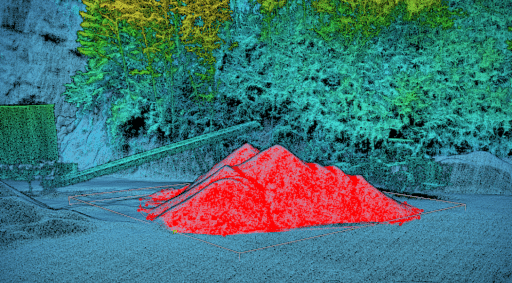
Geometric Measurements
- Volumetrics – cut and fill
- SDASN – standard deviation along surface normal
- Length and area
- Point density
LiDARSnap Updates
- Improved mobile mapping strip alignment
- Higher rate adjustments (for faster vehicles)
- Better utilization of small targets (poles, trees, etc.)
- Interactively measured GCP corrections
KEY FEATURES
ACQUISITION
- Configure all system sensor and store custom profiles to ensure the correct settings during each acquisition
- Live sensor control during acquisition allows the operator to respond as necessary
IN-FIELD QC
- A real-time point cloud and detailed navigation feedback provide instantaneous data quality control in the field
- Interactive data inspection with measurements and profile slices
POST-PROCESSING
- Process data from airborne, mobile, or other types of acquisitions using a single software
- Interactive data inspection with measurements and profile slices
- Flightline management and data filters
- LiDAR and imagery fusion and export
- Virtually unlimited project sizes
REQUIREMENTS
- Windows 10, 64bit
- Minimum 16 GB RAM, more depending on pointcloud size (recommended >= 64GB)
- OpenGL hardware support (recommended NVIDIA)
- SSD for data storage and temporary processing data
- Working internet connection for LiDARMill integration and for managing license activation
EXPAND WITH MODULES
SpatialExplorer can be expanded with a selection of plug-in modules that add advanced functionality at critical steps in the data collection and production workflow.

Live flight navigation for piloted airborne and mobile vehicle operations

Embedded GNSS+INS trajectory processing

Robust calibration, analysis, and reporting tools to complete the workflow

SLAM Processing through GNSS denied environments

MissionGuidance
The MissionGuidance module for SpatialExplorer helps streamline piloted data acquisitions by providing automated navigation tools for the pilots to stay exactly on course, as well as for the sensor operator to ensure flawless acquisition.
KEY FEATURES
- Pilot navigation display screen
- Velocity, heading, and elevation monitor
- Height maps and custom terrain models
- Remaining flight time estimates
- Operator flight plan view
- Interactive line scheduling
- Configurable tolerances
- Automatic line management
- Basemaps for spatial reference
- AGL oracle
HOW DOES Missionguidance work?
Plan Faster
Load and review a flight plan in SpatialExplorer prior to flight. Users can organize the approach, check and adjust heights, and configure the interface as desired.
Make Adjustments Instantly
Real-time acquisition management by the sensor operator from within SpatialExplorer during flight, ensuring that all passes are successfully collected within tolerance and according to the plan, rescheduling lines as necessitated by weather or other external factors, and making in-flight decisions confidently.
NavLab Embedded
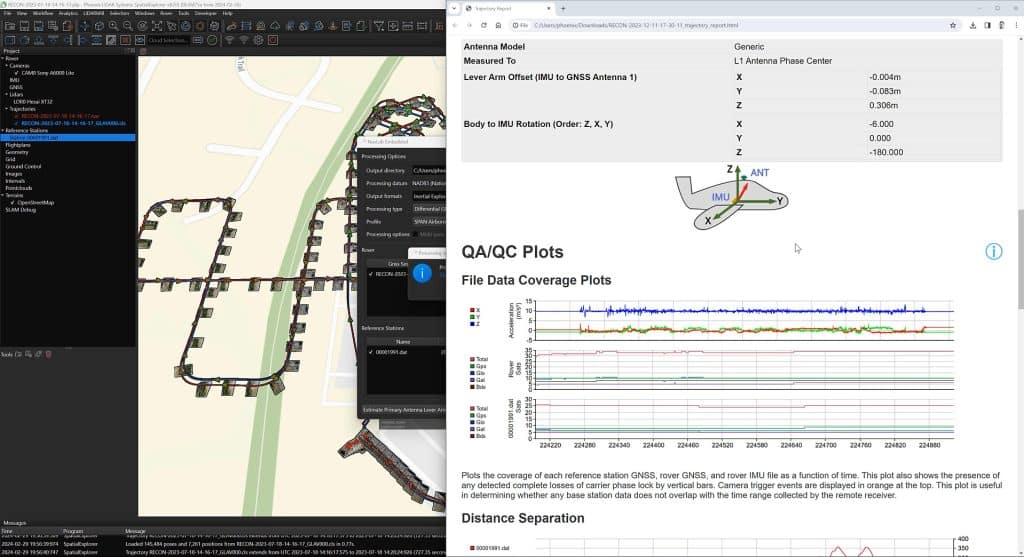
The NavLab Embedded module for SpatialExplorer simplifies and automates trajectory post-processing for achieving the best estimated trajectory from your navigation data.
KEY FEATURES
- GNSS differential corrections
- Precise Point Positioning
- INS loosely and tightly coupled integrations
- Embedded directly into SpatialExplorer desktop
- Reference station configuration
- IMU-to-Antenna lever arm offsets estimation and quality control reporting
- Seamless integration of Novatel’s InertialExplorer
- All-in one software workflow to eliminate coordinate reference system
- Fast, simplified, automated processing
SpatialPro
The SpatialPro module for SpatialExplorer expands the software with tools for fine tuning and deliverable data production.
KEY FEATURES
- LiDARSnap – LiDAR sensor, calibration, flightline matching, adjustment to control, and adjustment to other pointclouds
- CameraSnap – Camera calibration, automated and interactive feature detection, individual frame adjustment
- Advanced colorization with radiometric balancing and depth awareness to correct pixel to point mapping
- Multi-mission project calibration
- Import and calibrate 3rd party data and LAS/LAZ
- Classification with automated routines and fast interactive selections
- Statistical outlier removal and advanced noise reduction
- Change detection
- Raster and vector products (DEM, DSM, Contours, georeferenced floor plans)
- Application-specific exports (TopoDOT, Pix4D)
- Automated QC and accuracy reporting
- Complete your post-processing workflow with the right tools for high quality data production
- No compromise data accuracy with user control along each step of the way
- Built and designed by Phoenix LiDAR based on a decade of data production experience

SLAM
Simultaneous localization and mapping for GNSS denied areas.
HOW DOES SLAM WORK?
KEY FEATURES
- Estimate a trajectory from LiDAR data
- No GNSS required
- Automatic georeference with available GNSS
- Interactive processing and data refinement
- Noise filtering and outlier removal
- Automatic trajectory drift migration with loop closure detection
- SLAM profiles for pedestrian and mobile style data sets
- Interactive optimization to control points or control point clouds
- Simplified data acquisition using mobile device or tablet
- Map indoor and outdoor spaces that have little to no GNSS reception
- Hybrid SLAM uses any available GNSS during the scan for automatic georeference
- SLAM assisted trajectory processing for confidence through spotty GNSS